|
Description
Latelier
LOEIL de lEcole dArt dAix-en-provence présente une
installation interactive de grande échelle qui contient
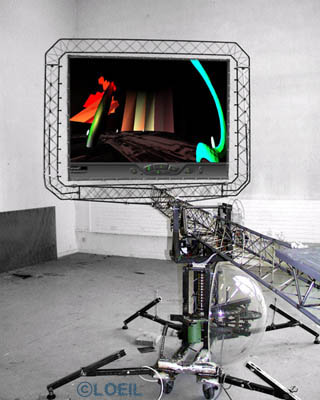
plusieurs éléments : un robot écran
" E-rex " ( Ecran Robot Exploreur), linformatique
et la vidéo.
Lensemble a été imaginé et créé
par un groupe détudiants et de professeurs de lécole.Le
robot " E-rex " est composé dun
écran de vidéoprojection et dun vidéo-data
projecteur qui sont placés sur un bras mobile, manipulé
par des spectateurs à partir dune grande sphère
- interface de pilotage externe.
" E-rex " peut faire des mouvements complets
circulaires et verticaux ce qui permet aux spectateurs dexplorer
un univers virtuel composé de systèmes planétaires
(où chaque planète peut être visitée)
à la manière dun téléscope géant
balayant des galaxies imaginaires.
Linteractivité de lespace virtuel, la visualisation
sur linternet et la manipulation de " E-rex
" en temps réel sont rendu possible grâce
à la programation en langage VRML.
" E-rex " sert aussi de plateforme pour
lexpérimentation de la vidéo dynamique.
Grâce au dispositif on peut intégrer en plus
de limage et du temps, une dimension suplémentaire :
le mouvement et la vitesse de lécran de projection
(la vidéo commandant la rotation du bras) dessinant
ainsi un espace relativiste.
Dispositif de lécran
Il sagit dun balayage
relativement lent dun espace tridimensionel. Le choix de
déplacement et l'arrêt face à une zone
sont déterminés par les balayages dans un espace
virtuel à laide dune interface externe similaire
à un joystique de jeux vidéo sans fils.
Il permet :
- Le
mouvement dans l'image/image en mouvement
- La découverte d'un espace virtuel par l'implication
physique du spectateur (kinéstésie)
- La capture du mouvement, téléprésences
La réception
permanente de nouvelles planétes interfaces à
des univers virtuels en VRML2.
Espace physique
Laire dévolution
du bras écran est de huit métres de diamètre.
En dehors de celle-ci, il est nécessaire davoir à
disposition un espace réservé aux spectateurs.
Lespace global dintervention est évalué à
300 M2, spectateurs compris, avec limpératif dobscursir
la salle quand le dispositif fonctionne.
Fiche Technique
-
écran robot, poids 250 kilos,
alimentation électrique 220 volts 16 ampères
- sphère de navigation, poids 25 kilos, alimentation 220V
- 2 PC PentiumII
450MHz et moniteurs
- 2 iMac pour le site Web
- Mac et moniteur
- station Silicon Graphic 320NT et moniteur + onduleur 220v
- magnétoscope HI8
- 4 tables de mixage
- 8 enceintes son
- un lecteur CD
Conception
direction
: Christian SOUCARET
conception
des mondes virtuels : Atelier 3D d'Aix
mécatronique : L. COSTES, M. JORIOT, G. BOYER
robotique : :Jean-Pierre MANDON
|